Wettlauf auf schiefer Ebene
Question
Solution
Short
Video
\(\LaTeX\)
Need help? Yes, please!
The following quantities appear in the problem:
The following formulas must be used to solve the exercise:

No explanation / solution video to this exercise has yet been created.
Visit our YouTube-Channel to see solutions to other exercises.
Don't forget to subscribe to our channel, like the videos and leave comments!
Visit our YouTube-Channel to see solutions to other exercises.
Don't forget to subscribe to our channel, like the videos and leave comments!
Exercise:
Ein Quader gleitet reibungslos eine homogene Kugel und ein homogener Zylinder rollen schlupffrei ohne Rollreibung dieselbe Strecke einer schiefen Ebene abwärts. Alle Körper haben dieselbe Masse. Die Bewegung nt ohne Anfangsgeschwindigkeit. Welcher Körper trifft am untern Ende zuerst welcher zuletzt ein?
Solution:
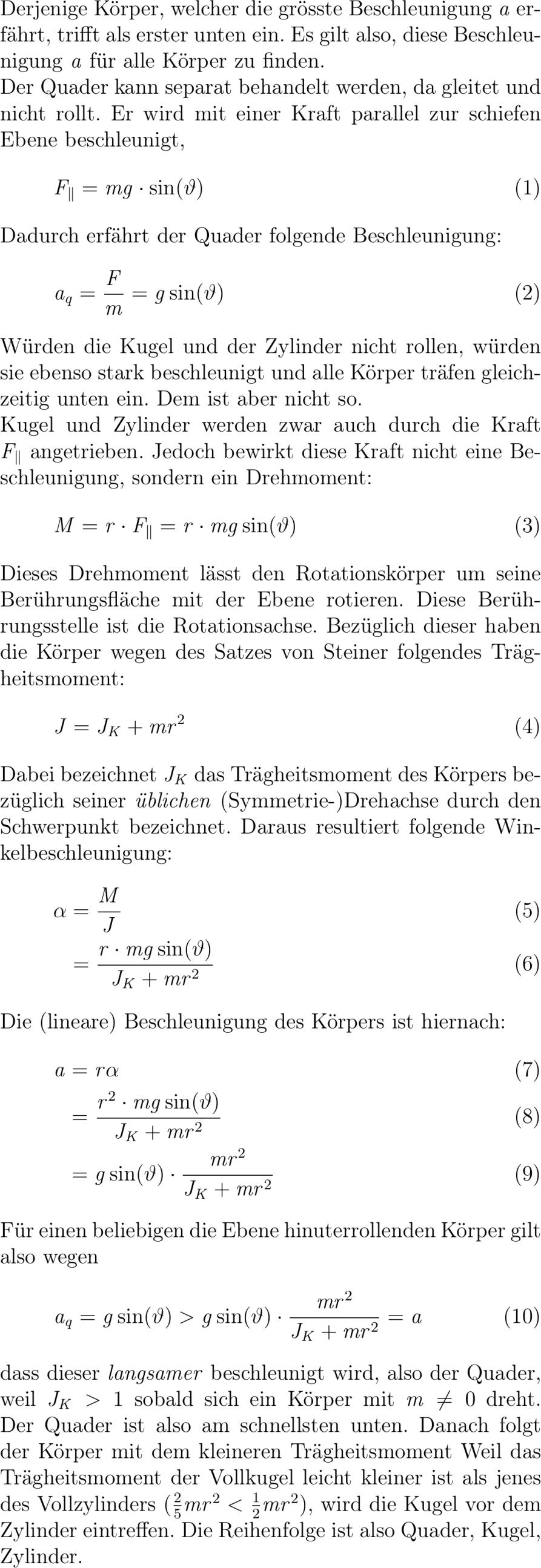
Derjenige Körper welcher die grösste Beschleunigung a erfährt trifft als erster unten ein. Es gilt also diese Beschleunigung a für alle Körper zu finden. Der Quader kann separat behandelt werden da gleitet und nicht rollt. Er wird mit einer Kraft parallel zur schiefen Ebene beschleunigt F_parallel mg sintheta Dadurch erfährt der Quader folge Beschleunigung: a_q fracFm g sintheta Würden die Kugel und der Zylinder nicht rollen würden sie ebenso stark beschleunigt und alle Körper träfen gleichzeitig unten ein. Dem ist aber nicht so. Kugel und Zylinder werden zwar auch durch die Kraft F_parallel angetrieben. Jedoch bewirkt diese Kraft nicht eine Beschleunigung sondern ein Drehmoment: M r F_parallel r mg sintheta Dieses Drehmoment lässt den Rotationskörper um seine Berührungsfläche mit der Ebene rotieren. Diese Berührungsstelle ist die Rotationsachse. Bezüglich dieser haben die Körper wegen des Satzes von Steiner folges Trägheitsmoment: J J_K + mr^ Dabei bezeichnet J_K das Trägheitsmoment des Körpers bezüglich seiner üblichen SymmetriDrehachse durch den Schwerpunkt bezeichnet. Daraus resultiert folge Winkelbeschleunigung: alpha fracMJ fracr mg sinthetaJ_K + mr^ Die lineare Beschleunigung des Körpers ist hiernach: a ralpha fracr^ mg sinthetaJ_K + mr^ g sintheta fracmr^J_K + mr^ Für einen beliebigen die Ebene hinuterrollen Körper gilt also wegen a_q g sintheta g sintheta fracmr^J_K + mr^ a dass dieser langsamer beschleunigt wird also der Quader weil J_K sobald sich ein Körper mit m neq dreht. Der Quader ist also am schnellsten unten. Danach folgt der Körper mit dem kleineren Trägheitsmoment Weil das Trägheitsmoment der Vollkugel leicht kleiner ist als jenes des Vollzylinders fracmr^ fracmr^ wird die Kugel vor dem Zylinder ereffen. Die Reihenfolge ist also Quader Kugel Zylinder.
Ein Quader gleitet reibungslos eine homogene Kugel und ein homogener Zylinder rollen schlupffrei ohne Rollreibung dieselbe Strecke einer schiefen Ebene abwärts. Alle Körper haben dieselbe Masse. Die Bewegung nt ohne Anfangsgeschwindigkeit. Welcher Körper trifft am untern Ende zuerst welcher zuletzt ein?
Solution:
Derjenige Körper welcher die grösste Beschleunigung a erfährt trifft als erster unten ein. Es gilt also diese Beschleunigung a für alle Körper zu finden. Der Quader kann separat behandelt werden da gleitet und nicht rollt. Er wird mit einer Kraft parallel zur schiefen Ebene beschleunigt F_parallel mg sintheta Dadurch erfährt der Quader folge Beschleunigung: a_q fracFm g sintheta Würden die Kugel und der Zylinder nicht rollen würden sie ebenso stark beschleunigt und alle Körper träfen gleichzeitig unten ein. Dem ist aber nicht so. Kugel und Zylinder werden zwar auch durch die Kraft F_parallel angetrieben. Jedoch bewirkt diese Kraft nicht eine Beschleunigung sondern ein Drehmoment: M r F_parallel r mg sintheta Dieses Drehmoment lässt den Rotationskörper um seine Berührungsfläche mit der Ebene rotieren. Diese Berührungsstelle ist die Rotationsachse. Bezüglich dieser haben die Körper wegen des Satzes von Steiner folges Trägheitsmoment: J J_K + mr^ Dabei bezeichnet J_K das Trägheitsmoment des Körpers bezüglich seiner üblichen SymmetriDrehachse durch den Schwerpunkt bezeichnet. Daraus resultiert folge Winkelbeschleunigung: alpha fracMJ fracr mg sinthetaJ_K + mr^ Die lineare Beschleunigung des Körpers ist hiernach: a ralpha fracr^ mg sinthetaJ_K + mr^ g sintheta fracmr^J_K + mr^ Für einen beliebigen die Ebene hinuterrollen Körper gilt also wegen a_q g sintheta g sintheta fracmr^J_K + mr^ a dass dieser langsamer beschleunigt wird also der Quader weil J_K sobald sich ein Körper mit m neq dreht. Der Quader ist also am schnellsten unten. Danach folgt der Körper mit dem kleineren Trägheitsmoment Weil das Trägheitsmoment der Vollkugel leicht kleiner ist als jenes des Vollzylinders fracmr^ fracmr^ wird die Kugel vor dem Zylinder ereffen. Die Reihenfolge ist also Quader Kugel Zylinder.